- Jste zde:
- Úvodní stránka »
- Odborné články »
- Pojízdné laboratoře k výzkumu Sluneční soustavy - budoucnost
Pojízdné laboratoře k výzkumu Sluneční soustavy - budoucnost
4. část: Z říše fantazie
Připravují se i ponorky
ATRON – sestava minirobotů
Skákající kuličky
Valící se obří míč
Malý, ale výkonný
Připravují se i ponorky
Europa je jedním z velkých měsíců planety Jupiter. Pozornost nejen astronomů přitahuje především díky zjištěnému faktu, že se pod jeho ledovou kůrou nachází oceán slané vody. Někteří vědci označují Europu za kosmické těleso, na kterém by se mohl vyskytovat život. Abychom mohli toto vodní prostředí zkoumat, potřebujeme kosmickou sondu, která by přistála na ledovém povrchu vzdáleného měsíce, následně pronikla ledovou vrstvou o tloušťce zhruba 10 km a při pohybu ve vodním prostředí prováděla výzkum. Prototyp takového podmořského plavidla se zkoušel v červnu 2007 v jezeře El Zacatón v Mexiku, což je nejhlubší zaplavená propadlina na světě.
Automatická miniponorka je označována zkratkou DEPTHX (Deep Phreatic Thermal Explorer). Jejím úkolem bylo zmapovat tvar propadliny a přivézt vzorky vody a hornin ze stěn v různých hloubkách. Důležitým úkolem expedice bylo ověřit technologie, které budou použitelné pro náročné podmínky při výzkumu ledového oceánu Evropy.
Pokud by byl takovýto projekt výzkumu oceánu na měsíci Europa uskutečněn, jednalo by se o nejsložitější misi ve výzkumu Sluneční soustavy, jaká kdy byla realizována. „Jsme stoprocentně přesvědčeni, že na Europě existuje oceán kapalné vody. Avšak zatím nemáme ani ponětí o tom, zda v něm existuje život,“ říká Chris McKay, Ames Research Center, NASA. Pravděpodobně by se nejednalo o rozvinutý život, možná jen o některé druhy bakterií, spór, hub, vodních rostlin apod., pokud vůbec nějaký život tak daleko od Slunce bude objeven.
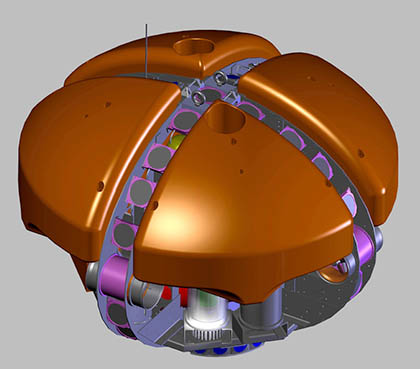
Ponorka DEPTHX má vejčitý tvar o rozměrech 4,26 x 3,04 m a hmotnost 1,3 tuny. Může se volně pohybovat, vznášet a sledovat určitou dráhu ve všech směrech bez jakýchkoliv vnějších povelů. Pro zajištění manévrování je zařízení opatřeno 6 motory, což mu dovolí pohyb v libovolném směru. Výzkumné zařízení DEPTHX může rovněž dlouhodobě pobývat na jednom na místě.
Ponorka DEPTHX je vybavena 54 sonary, rozmístěnými rovnoměrně kolem vlastní konstrukce. Sonar používá pulsy ultrazvukových vln o vysokém výkonu a na základě jejich odrazu lokalizuje objekty do vzdálenosti až 300 m od ponorky. Informace jsou zpracovány počítačem a využívány pro navigaci. Kromě sonaru je k navigaci využíván akcelerometr, hloubkoměr a inerciální řídící jednotka. Na základě získaných dat je vytvářen počítačový trojrozměrný obraz okolního prostředí. Dále je ponorka vybavena širokoúhlou kamerou k pořizování snímků, rovněž se provádí měření tlaku, teploty a koncentrací některých chemických látek v okolním vodním prostředí. Je také vybavena rozkládacím ramenem, pomocí něhož je možné provádět odběr, a také pomocí mikroskopu pátrat po přítomnosti živých organismů. K osvětlení prostředí používá výkonné světlomety.
Jestliže na měsíci Europa existuje oceán kapalné vody a jestliže tam existuje podmořská sopečná činnost v důsledku působení slapových sil, potom mohou být na dně oceánu hydrotermální průduchy, podobně jako to známe z pozemních moří a oceánů v blízkosti středo-oceánských hřbetů (tzv. černí kuřáci). V pozemských oceánech jsou tato místa zaplněna bohatým různorodým životem. Může to platit i o Europě? Toť zatím nezodpovězená otázka.

Ponorka DEPTHX při zkouškách
Jakmile budou úspěšně dokončeny zkoušky zařízení v propadlině El Zacatón, plánuje společnost Stone Aerospace postavit další exemplář s názvem ENDURANCE (Environmentally Non-Disturbing Under-ice Robotic Antarctic Explorer), který bude dalším krokem na cestě k vývoji zařízení pro kosmický výzkum. Bude mnohem menší, avšak stejně výkonné jako DEPTHX. Zkoušky zařízení ENDURANCE se uskuteční v jezerech v oblasti severního pólu Země, která jsou ukryta pod vrstvou ledu. NASA nyní vyvíjí technologie k roztavení sloupce ledu o tloušťce několika km, aby zařízení mohlo proniknout do jezera, ukrytého pod ledem. Již v roce 2002 proběhly zkoušky sondy typu „cryobot“ o délce 1 m a průměru 12 cm. Zařízení opatřené měděnou hlavicí zahřívanou na 100 °C proniklo během 4 dnů do hloubky 22,5 m.
Při výzkumu oceánů na některých planetárních tělesech by bylo po dosažení kapalného prostředí uvolněno zařízení „hydrobot“, které by provedlo výzkum vodního prostředí. K uskutečnění výzkumu oceánu na Jupiterově měsíci Europa je však ještě dlouhá cesta. Na otázku básníka: „Jsou-li tam žáby taky …“ odpověď asi hned tak nedostaneme.
Zdokonalená ponorka ENDURANCE prováděla v prosinci 2008 výzkum jezera West Lake Bonney v oblasti McMurdo Dry Valleys, které je ukryto pod ledovou pokrývkou. Pomocí přístrojů na palubě je schopna provádět měření teploty, elektrické vodivosti, okolního světla, přítomnost chlorofylu, rozpuštěných organických látek, měření pH vody a další výzkumy.
Připravovaná ponorka ENDURANCE
ATRON – sestava minirobotů
Pod názvem ATRON se skrývá kulovité zařízení s výsuvnými háčky, pomocí nichž se dokáže mechanicky spojit s dalšími roboty téhož druhu. Funkční prototyp robota byl předveden v Japonsku. Je sestaven z několika stejných modulů, jejichž vzájemná poloha se mění podle situace, stejně se může měnit i způsob pohybu. „Předpokládáme, že podobné vlastnosti jsou velmi vhodné při průzkumu oblastí nebezpečných pro člověka, a také v kosmickém výzkumu, kde může tento robot nahradit například současné marsochody,“ říká Hendrik Hautop Lund, vedoucí projektu na Maersk Institute (Dánsko). Lund dále předpokládá, že jednoduchá konstrukce jednotlivých částí robota umožní společnou práci až 100 modulů, spojených v jeden celek.

ATRON se svým vynálezcem
ATRON je sestrojen z několika stejných modulů tvaru koule o průměru 11 cm. Každý jednotlivý element je rozdělen na dvě polokoule, které se mohou otáčet nezávisle na sobě pomocí elektromotoru. Dále jsou jednotlivé elementy opatřeny zámky, umožňující spojování modulů navzájem. Všechny moduly jsou vybaveny vlastními počítači, které si navzájem vyměňují informace a spolupracují při plnění výzkumných úkolů.
Robert Richardson, vědecký pracovník University of Manchester (Velká Británie) je přesvědčen, že při výzkumu vesmíru se mnohem lépe uplatní modulární robot, který bude schopen vykonávat rozličné práce, než několik „obyčejných“ robotů, kteří jsou schopni jen chodit, nebo se jen pohybovat na kolech. K realizaci projektu je však ještě velmi daleko.
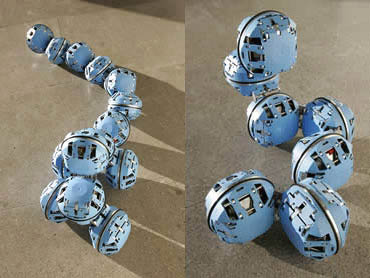
ATRON
Skákající kuličky
Inženýři a vědci z MIT (Massachusetts Institute of Technology, Cambridge) představili svou vizi pro budoucí výzkum Marsu: velké množství sond, každá o velikosti basebalového míče, které by byly rozmístěny po celém povrchu planety. Každá sonda by vážila okolo 100 gramů a měla by svůj vlastní malý palivový článek. „Mohla by hopsat daleko, dlouhou dobu, jen za použití několika gramů paliva,“ řekl Steven Dubowsky, profesor MIT a vedoucí projektu.
Umělé „svaly“ uvnitř sondy jí umožní poskočit průměrně 6krát za hodinu, maximální rychlost přesunu je 60 poskoků za hodinu. Zařízení překoná skokem vzdálenost asi 1,5 m. Každá sonda ponese různé typy čidel včetně kamer a vnějších detektorů. Sondy jsou zhotovené z pevného a lehkého plastu, který bude odolný vůči extrémně nízkým teplotám na Marsu. Palivové články budou poskytovat dostatečné teplo, aby udržely elektroniku a senzory funkční.
Tisíc sond má stejný objem i hmotnost jako marťanský robot Spirit. Těchto 1 000 minisond pokryje obrovskou oblast, která je mimo dosah současných robotů včetně prozkoumání vzdáleného a skalnatého terénu, v němž se současní roboti nemohou pohybovat. Minisondy by mohly vstoupit do vyschlých koryt řek, kaňonů nebo vzhledem ke svým malým rozměrům i dovnitř prohlubní a dutin.
„Jednou z hlavních výhod maličkých sond je, že při ztrátě několika ze stovek nebo tisíce sond, vyslaných do zrádné oblasti, by nebyla ohrožená celá mise,“ řekl Dubowsky. A ještě dodal: „Jsme ochotni obětovat některé z těchto 1 000 koulí, abychom získali informace z nepřístupných oblastí.“ Prostřednictvím Lokální počítačové sítě (LAN - Local Area Network) by tyto minisondy byly stále ve spojení s retranslační družicí, která by veškerá informace předávala na Zemi.
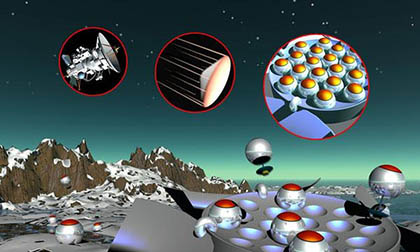
Miniaturní roboti připraveni k průzkumu
Dubowskyho tým odhaduje, že minisondy by mohly být vyslány na Mars do 10 let. Zatím jsou naplánovány pozemské testy v oblasti Nového Mexika, aby se ověřila jejich schopnost vypořádat se s nerovným terénem. Proto vědci spolupracují i s Penelope Bostonovou, která se zabývá výzkumem jeskyní a krasových oblastí (Institute of Mining and Technology, New Mexico).
Autoři navrhují pro minisondy i jiné, pozemské využití: záchranné mise ve zřícených budovách nebo na dalších nebezpečných místech, nebo také v boji proti terorismu (např. hledání teroristů v jeskyních).
Valící se obří míč
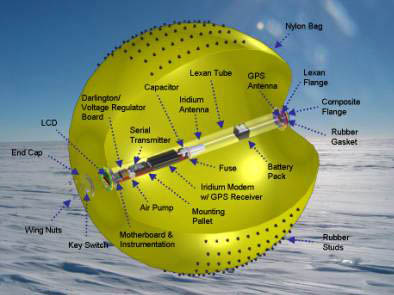
V jižních polárních oblastech Země prováděla NASA zkoušky nového typu „planetochodu“ (Tumbleweed rover), určeného k výzkumu povrchů planet či jejich měsíců. Robot má tvar nafukovacího míče o průměru přibližně 1,8 metru. Vyvinula jej Jet Propulsion Laboratory (NASA) v Pasadeně. Zkoušky probíhaly v roce 2004 v blízkosti polární stanice Amundsen-Scott South Pole Station.
Uvnitř kutálejícího se „balónu“ byly umístěny některé vědecké přístroje – detektory teploty, tlaku, vlhkosti a světelných podmínek, a dále komunikační zařízení pro spojení přes družice Iridium. Po uvolnění se zkušební balón začal kutálet v důsledku vanoucího větru napříč ledovou plání. Za 8 dnů překonal vzdálenost 70 km. Důležitým výsledkem zkoušek je fakt, že uvnitř balónu byla udržována teplota až do +30°C, zatímco venku panoval mráz -30°C. K vyhřívání vnitřních prostor posloužila pouze neustále zapnutá elektronika a malý ventilátor, který zabezpečoval přenos teplého vzduchu do všech částí robota ve tvaru míče. V průběhu zkoušek průzkumník bezchybně předával přes družice naměřená data. Podle intenzity větru se občas téměř zastavil, občas si to „hasil“ rychlostí až 16 km/h.
NASA plánuje vývoj dalších robotů této série. Zvyšovat se bude počet přístrojů vědeckého vybavení – například se uvažuje o zařazení radaru pro hloubkový průzkum podpovrchových vrstev planet. Konečným cílem je výroba několika levných a efektivních planetárních výzkumníků, určených mj. pro výzkum polárních čepiček planety Mars.
Cílem je vyvinout průzkumného robota ve tvaru míče, který bude mít po nafouknutí průměr 6 m. Takovýto robot o hmotnosti 20 kg „unese“ 20 kg vědeckých přístrojů. Dosavadní zkoušky potvrzují, že balón o průměru 6 m bude schopen pohybovat se i do svahu se sklonem 25°.

Nafukovací robot Tumbleweed o průměru 1,5 m při pozemních zkouškách

Návrh kutálejícího se robota pro výzkum Marsu
Malý, ale výkonný
Fredrik Bruhn (Uppsala University, Švédsko) navrhuje pro výzkum Marsu nafukovacího robota ve tvaru koule velikosti většího fotbalového míče (průměr 30 cm). Energie z jedné baterie umožní robotu překonat vzdálenost 100 km. K dobíjení baterie by sloužily sluneční články na povrchu robota. Do pracovní podoby by se nafouknul xenonem z vložené náplně po vysazení na povrch planety. Uvnitř balónu bude umístěno kyvadlo, které bude mít zásadní význam při pohybu robota.
Uvnitř balónu (v duté nápravě) budou instalována atmosférická čidla, kamery a další vybavení. Pomocí kyvadla se může balón naklánět na stranu a provádět tak odběr vzorků horniny. Povrch robota je vybaven sadou elektrod, které umožní zjišťovat elektrické vlastnosti povrchu zkoumaného tělesa. Informace budou na Zemi předávány přes družici na oběžné dráze. Na projektu spolupracuje také NASA.
Na povrch planety by byl robot dopraven společně s přistávacím modulem či pojízdnou laboratoří. Jakmile nastane vhodná chvíle, průzkumný robot se nafoukne do funkčního tvaru a zahájí výzkum. O obdobném projektu se uvažovalo v případě evropsko-japonské sondy BepiColombo, jejíž start k planetě Merkur je naplánován na rok 2014. Původně se mělo jednat o trojdílnou sondu. Kromě mateřské sondy na oběžné dráze a malé sondy k výzkumu magnetického pole planety se plánovalo vysazení přistávacího modulu v oblasti jednoho z pólů Merkuru, kde je výrazně nižší teplota. Některá pozorování naznačují, že by se zde mohla nacházet voda v podobě ledu. Přistávací modul byl nakonec z vybavení mise vyškrtnut.
Kresba robota ve tvaru míče o průměru 30 cm
Vyhledávání
Novinky
26.02.16
Robotika s Legem – jednoduchými kroky ke složitému cíli
Malé shrnutí postřehů po pěti letech od vzniku a zařazení do nabídky programů Robotika je název programu, který patří ke speciálním vzdělávacím pořadům hvězdárny a pravděpodobně jej už můžeme zařadit k oblíbeným stálicím naší nabídky. Program je určen především pro žáky vyšších ročníků základních škol a studenty škol středních.
15.11.13
Planetárium v Polus City Center
30.04.13
Prezentace výsledků projektu na Trenčianskom robotickom dni
Díky rozvoji přeshraniční spolupráce jsme byli k aktivní účasti pozváni organizátory 8. ročníku Trenčianského robotického dňa. Akce se účastnila také naše partnerská Hvězdárna v Partizánskom, a tak jsme i přes velké pracovní vytížení do Trenčína přijeli. Akce byla v mnoha ohledech poučná a inspirativní a nejen že jsme seznámili posluchače s novými vzdělávacími programy, ale hlavně oslovili žáky a studenty se zájmem o automatizaci a robotizaci.